| |
PEDALing
into the Future: Three applications
Gecko-inspired
adhesive
 |
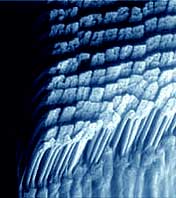
Closeup
(magnified 700 times) of the tiny hairs, or setae, that
line geckos' toes.
|
| |

The
branches, or spatulae, on the end of a single gecko
seta, magnified 30,000 times.
Photographs
by Kellar
Autumn, an assistant professor of biology at Lew
& Clark College and former UC Berkeley graduate
student who is now a collaborator with Full.
|
How
geckos manage to walk on walls and across ceilings has been
a mystery for many years. Some scientists speculated that
the lizards' feet relied on a layer of water whose surface
tension created sticking power. But working in the PolyPEDAL
Lab, Full gained a greater knowledge of the structure of a
gecko foot, which has millions of microscopic hairs (called
setae) on its bottom. These tiny setae span just two diameters
of a human hair, or 100 millionth of a meter, and each seta
ends with 1,000 even smaller pads at the tip.
As
they announce in an forthcoming journal article in the Proceedings
of the National Academy of Sciences, Full and other researchers
from Lewis & Clark College, UC Berkeley, UC Santa Barbara
and Stanford University have developed synthetic copies of
the tip of one of these microscopic hairs, using two different
materials. By doing so, they have ruled out water adsorption
as the source of the sticking power, concluding that the setae
instead take advantage of Van Der Waals forces (weak intermolecular
attraction) to adhere temporarily. (For details, read the
press
release.) "We confirmed it is geometry, not surface chemistry,
that enables a gecko to support its entire body with a single
toe," says Berkeley engineering professor Ron Fearing.
That means the adhesive can be made out of any material.
Why
so much fuss over a gecko toe? It turns out that when grouped
together, these setae could outswing Spider Man. A single
seta can lift an ant a hundred times the seta's weight. A
million setae, which could easily fit onto the area of a dime,
could lift a small child. And it could do this without leaving
a residue, latching on faster and more easily than Velcro.
A
dry, self-cleaning adhesive like this would have many commercial
applications. The team has filed patents and is partnering
with several companies to develop a reusable adhesive material
that could be applied in a number of ways, from transporting
semiconductor chips through a factory's vacuum chamber (using
suction devices can scratch the chips), to moving fiber-optic
pieces through the human body for surgery and attaching equipment
to the exterior of a space station. Or, artificial setae could
help build the most mobile robot yet — unfazed by slippery
vertical surfaces and able to hang from the roof by a single
hair.
Artificial
muscles
The
self-stabilizing principles identified by Full have changed
the way researchers think of artificial muscles, whether as
part of a robot or a future human prosthetic.
Early
artificial limbs have resembled unwieldy Terminator-strength
steel joints with wire tendons. To move in concert, these
limbs have been computer-guided. But as it turns out, it's
possible to get a two-legged robot with artificial muscles
to walk without a brain, merely by making its muscles out
of a flexible, springy material and setting the tension carefully.
"If
you set the muscles right, so that just as the leg extends,
it stretches the muscles a little bit to stop the motion,
and then if you time it right to sit it back down, you can
get remarkable stability," says Full.
Full
is working with SRI International to see if simple pieces
of acrylic or silicone, when activated appropriately, will
operate in the same fashion as real muscles do. In the future,
"instead of having all those separate parts and a big
motor that runs them — something you attach to a prosthetic,
for example — you'll have something more lightweight,"
says Full. "At a joint right now, a single motor pretty
much dominates the whole joint. Eventually you'll be able
to put 10, 20 artificial muscles together and have much more
sophisticated control."
Robots
Forget
the Jetsons and their robot maids. Full is more interested
in what thinking machines can do to help humans in distress.
"One of the things we hope robots will be useful for
is search and rescue," he says. "A small, multilegged
robot should be able to go into a troubled area, whether the
result of an earthquake or bombing, and search for individuals.
Imagine a swarm of insects quickly going in to check for life."
The PolyPEDAL Lab is working with engineers to integrate antennae,
eyes and sensors that feel and detect heat into the current
crop of robots. Ariel, developed by iRobot in collaboration
with Full, can already locate mines lying on the sandy surface
of the surf zone. Future ant-sized robots, similar to ones
that Berkeley engineering professor Kris Pister is working
on, could perform microsurgery.
In
the near term, Full sees robots and robotic devices
extending the reach of the electronic world. "We
can already see other places remotely, through the Internet,"
he says. "What if we could actually do things
there? Robots could give the Internet legs and hands."
|
|
